
موضوع : مدار منطقی – نسخه ترجمه فارسی
✍️ تالیف : نلسون
📌 آموزش mini PLC امرن ZEN

فهرست مطالب
مقدمه: ۱
تشریح عملکرد مدار با زبان ساده ۲
۱- بخش اصلی مدار یا تابلوی LED ها: ۲
۲ – قسمت ترانزیستور ها و آی سی ۴۰۵۱ ۶
۳ بخش هوشمند یا مغز و پردازنده و برنامه ریز مدار: ۶
۴- بخش تغذیه مدار: ۶
۵- بخش key bord و تحریر و تعویض حروف و کلمات: ۷
ب- روش جاروب کردن LED ها (SCAN) به صورت تک به تک ۱۲
ج- نحوه نمایش با روش جاروب کردن LED ها به صورت ستونی ویا سطری ۱۳
د- روش شیفت دادن (shift) ۱۴
تشریح عملکرد آی سی ۴۰۵۱ ۱۵
عملکرد آی سی شماره ۸۹c51 یا ۸۹c52 (میکروکنترلر) ۱۷
الف- حافظه ثابت ۱۸
ب- حافظه موقت ۱۸
ج- حافظه های خاص ۱۹
نحوه عملکرد port های خروجی یا ورودی میکروکنترلر ۱۹
نحوه خواندن اطلاعات از طریق Port ۲۲
نوسان ساز داخلی آی سی ۸۹۵۱ و تغذیه آن ۲۵
نحوه Reset کردن آی سی میکروکنترل ۲۵
پین ها پایه های لازم برای استفاده از حافظه های ثابت و موقت خارجی ۲۶
پایه بندی میکروکنترلر ۸۹۵۱ ۲۷
پایه بندی کلید سلکتور الکترونیکی ۴۰۵۱ ۲۸
قسمت تغذیه مدار ۲۹
تغذیه اضطراری آی سی میکروکنترلر ۸۹۵۱ ۳۰
عملکرد برنامه داخلی آی سی ۸۹۵۱ برای اجرای مدار تابلو نورانی ۳۱
نحوه ذخیره شکل در حافظه ثابت آی سی ۳۲
مقدمه
امروزه با بهبود عملکرد، کارایی و عوامل امنیتی، شبکههای بیسیم به شکل قابل توجهی در حال رشد و گسترش هستند و استاندارد IEEE 802.11 استاندارد بنیادی است که شبکههای بیسیم بر مبنای آن طراحی و پیاده سازی میشوند.
در ماه ژوئن سال ۱۹۹۷ انجمن مهندسان برق و الکترونیک (IEEE) استاندارد IEEE 802.11-1997 را به عنوان اولین استانداردِ شبکههای محلی بیسیم منتشر ساخت. این استاندارد در سال ۱۹۹۹ مجدداً بازنگری شد و نگارش روز آمد شده آن تحت عنوان IEEE 802.11-1999 منتشر شد. استاندارد جاری شبکههای محلی بیسیم یا همانIEEE 802.11 تحت عنوان ISO/IEC 802.11-1999، توسط سازمان استاندارد سازی بینالمللی (ISO) و مؤسسه استانداردهای ملی آمریکا (ANSI) پذیرفته شده است. تکمیل این استاندارد در سال ۱۹۹۷، شکل گیری و پیدایش شبکه سازی محلی بیسیم و مبتنی بر استاندارد را به دنبال داشت. استاندارد ۱۹۹۷، پهنای باند ۲Mbps را تعریف میکند با این ویژگی که در شرایط نامساعد و محیطهای دارای اغتشاش (نویز) این پهنای باند میتواند به مقدار ۱Mbps کاهش یابد. روش تلفیق یا مدولاسیون در این پهنای باند روش DSSS است. بر اساس این استاندارد پهنای باند ۱ Mbps با استفاده از روش مدولاسیون FHSS نیز قابل دستیابی است و در محیطهای عاری از اغتشاش (نویز) پهنای باند ۲ Mbpsنیز قابل استفاده است. هر دو روش مدولاسیون در محدوده باند رادیویی ۲٫۴ GHz عمل میکنند. یکی از نکات جالب توجه در خصوص این استاندارد استفاده از رسانه مادون قرمز علاوه بر مدولاسیونهای رادیویی DSSS و FHSS به عنوان رسانه انتقال است. ولی کاربرد این رسانه با توجه به محدودیت حوزه عملیاتی آن نسبتاً محدود و نادر است. گروه کاری ۸۰۲٫۱۱ به زیر گروههای متعددی تقسیم میشود. شکلهای ۱-۱ و ۱-۲ گروههای کاری فعال در فرآیند استاندارد سازی را نشان میدهد. برخی از مهمترین زیر گروهها به قرار زیر است:
– ۸۰۲٫۱۱D: Additional Regulatory Domains ( دامنه های تنظیمی اضافی)
– ۸۰۲٫۱۱E: Quality of Service (QoS) ( وضعیت سرویس)
– ۸۰۲٫۱۱F: Inter-Access Point Protocol (IAPP) ( پروتکل نقاط دسترسی ورود)
– ۸۰۲٫۱۱G: Higher Data Rates at 2.4 GHz ( داده های بالاتر از سرعت ۲٫۴ )
– ۸۰۲٫۱۱H: Dynamic Channel Selection and Transmission Power Control (انتخاب کانال پویا و انتقال قدرت کنترل)
– ۸۰۲٫۱۱i: Authentication and Security ( هویت سنجی و امنیت )

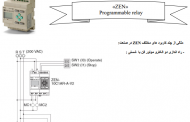
تمامی سیستم های امنیت و حفاظت الکترونیکی از اجزای نشان داده شده در شکل زیر تشکیل شده اند. در این سیستم ها یک یا چند واحد حسگر وجود دارد که در هنگام وقوع خطر گونه ای از سیگنال الکتریکی را تولید میکنند و سیگنال های خروجی این حسگرها نیز از طریق « خط انتقال داده » به واحد « واکنش گر خطر » که شامل ادواتی مانند آژیر خطر، دستگاههای مسدود کننده و یا بازکننده الکترو مکانیکی می باشد اعمال میگردد. باید توجه کرد که در شکل زیر هر یک از سه واحد اصلی تشکیل دهنده ی سیستم منابع تغذیه مستقلی دارند ولی در عمل امکان دارد دو یا چند واحد یک منبع تغذیه مشترک داشته باشند.
فهرست مطالب
اساس سیستم های حفاظت الکترونیکی ۱
کلیدهای صفحه ای حساس به فشار ۷
واحد های مبتنی بر پرتوهای نوری ۸
قفل رمزدار الکترونیکی ۱۰
خطوط انتقال داده با تزویج نوری ۱۲
قسمتهایی که عملکرد آنها بر مبنای کار رله ها میباشند ۱۳
مدارهایی که خروجی آنها رله و زنگ خطر می باشد ۱۵
مدارهای آژیر ۱۹
مدارهای حساس به نور مرئی ۲۱
مدارهای آلارم ضد سرقت ۲۳
مدارهای واکنش گر در برابر صدا ۲۷
قفل الکترونیکی درب منزل ۳۰
مروری بر خانواده ۸۰۵۱ ۳۱
توصیف پایه های ۸۰۵۱ ۳۲
RST ۳۴
EA , PSEN , ALE ۳۴
پایه های پورت I/O و عملکرد آنها ۳۵
شرح سخت افزاری پروژه : ۳۵
نتیجه گیری : ۳۸
ضمیمه ۳۹

موتور پلهای را میتوان جز گروه سیستمهای محرکه بدون جاروبک به حساب آورد. کاربرد اصلی این نوع موتور در سیستم تثبیت و سیستم تنظیم موقعیت حلقهباز است. موتورهای پلهای از نوع ac هستند و فرمان ورودی به شکل پالسهای الکتریکی است.
اصول کارکرد
موتورهای DC زغالی زمانیکه ولتاژ به ترمینالهای آنها تزریق می گردد به نرمی حرکت می کنند. استپ موتور بوسیله قابلیت تبدیل پالسهای ورودی به فواصل کوچک مشخص در موقعیت شفت شناخته می شوند. هر پالس شفت را به یک زاویه مشخص می برد. استپ موتورها اساسا دارای دندانه های مغناطیسی در اطراف یک شفت مرکزی از جنس آهن می باشند. الکترومغناطیسها بوسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه می گردند. جهت چرخاندن شفت ابتدا به یکی از مغناطیس ها توان داده می شود ، که مغناطیس باعث جذب دندانه های دنده می گردد. زمانیکه دندانه دنده روبروی اولین مغناطیس می ایستد ، نسبت به مغناطیس بعدی دارای یک فاصله می باشد. این به معنای آنست که در صورت روشن شدن الکترومغناطیس بعدی و خاموش شدن اولی دنده به آهستگی می چرخد تا دندانه روبروی مغناطیس دوم قرار گیرد. از آنجا فرآیند آغاز می گردد. هر یک از این چرخشها یک گام ( استپ ) نامیده می شود، تعداد مشخصی از این گامها یک دور کامل موتور را می سازند ( دقت شود نسبت تعداد گامها به دور موتور همواره یک عدد صحیح است ). و به این ترتیب یک موتور می تواند با زوایای مشخص بچرخد.

#جزوه
معرفی و بررسی مشخصات فنی انواع فیوز ها

✨✨سروو موتور A2 دلتا✨✨
۲۲۰ ولت تا ۱٫۵ کیلووات تکفاز
۴۰۰ ولت سه فاز از ۲ کیلووات به بالا
کنترل حلقه بسته .
قابل ارائه با انکودر زاویه ای Absolute
پشتیبانی از شبکه Canopen/Ethercat/DMCNET/Modbus
دارای ورودی و خروجی دیجیتال جهت کنترل موتور.
قابلیت اجرای E-Cam
گستره کنترل سرعت ۱:۵۰۰۰
ارتباط با کامپیوتر و تنظیم پارامترها و مشاهده منحنی های موتور از طریق USB
دارای ورودی خروجی دیجیتال
سرعت پاسخگوئی بالا مناسب تمام ماشین های CNC چند محور
#منوال فارسی سرو A2 دلتا ✅

واژه PAC برگرفته از Programmable Automation Controller می باشد. به طور کلی PAC به مجموعه ادوات و دستگاه هایی گفته می شود که در فرایند های اتوماسیون به کار رفته و قابل برنامه ریزی هستند. این سیستم ها از حیث کاربری پیچیدگی ها و امکانات بیشتری را نسبت به سیستم های قدیمی تر خود یعنی PLC ها در بر می گیرند.

پیشنهاد ویژه برای شروع کار با PLC دلتا